合作留言
企业信用APP
我要加入
我要维权
|
注册
登录
找回密码
|
设为首页
加为收藏
企业查询
信用编码
法定代表人
股东
失信被执行人
选择地区
省份
城市
区县
高级
清除
查企业信用,到11315.com
首页
征信资讯
行业展示
城市信用
律师联盟
信用调解
服务体系
平台介绍
沈阳中科博微科技股份有限公司
访客留言
申请认证
信用网址:
81971661.11315.com
股份有限公司(非上市、自然人投资或控股)
成立历史第
22
年
我要评价
我要咨询
发票抬头详情
企业名称
税号
企业地址
开户银行
银行账户
加入收藏
浏览量:
855
下载信用报告
专利信息
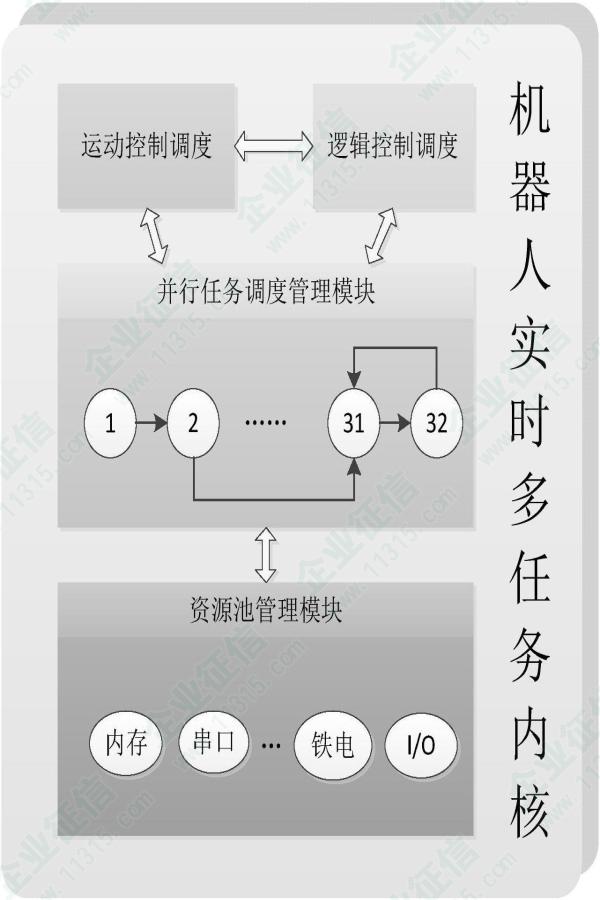
一种基于机器人控制的多任务实时处理与同步方法
【异议或纠错】
档案编号:
CQ-751-4340-2330
档案文号:
需要登录以后查看